
Application scope:
The TM362 / TM362-P are designed for use with ground vehicles, drones, robotics, which are non-safety critical consumer and industrial applications; in addition, the TM362-P makes it possible for use in such as marine or autonomous guided vehicle applications where turn-on bias drifting is of major concern.
| PERFORMANCE | ROLL | PITCH | YAW | |
|---|---|---|---|---|
| Resolution | 0.01°/s | 0.01°/s | 0.01°/s | |
| Angle range | -180° ~ 180° | -90° ~ 90° | 0° ~ 360° | |
| Static accuracy | <0.3° | <0.3° | <0.8° | RMS Error1, 2, 3 |
| Dynamic accuracy (inertial) |
<0.8° | <0.8° | 2.6° error1, 3 every 25 minutes (TM362) 1.7° error1, 3 every 25 minutes (TM362-P) |
RMS Error1, 2 |
| 1. According to test results in mostly laboratory environment,actual performance may vary depending on the motion dynamics. 2. Roll and Pitch error includes error introduced by communication latency at 115200 bps. 3. Typical city car driving dynamic condition, including sharp and slow turning, slopes, with fast and gentle accelerations and traffic light stops. |
||||
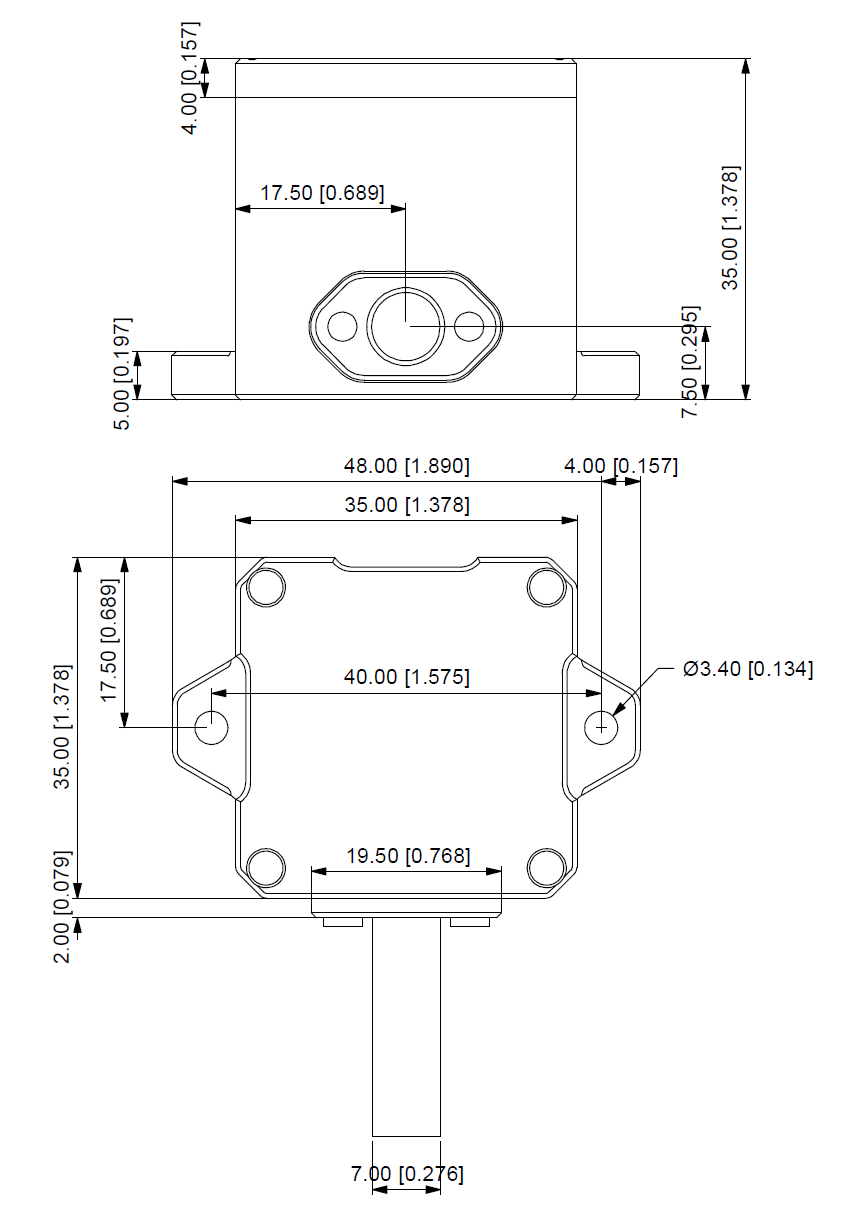
COMPACT PACKAGE WITH RUGGED DESIGN
- 35 x 48 x 35 (Including Mounting Brackets)
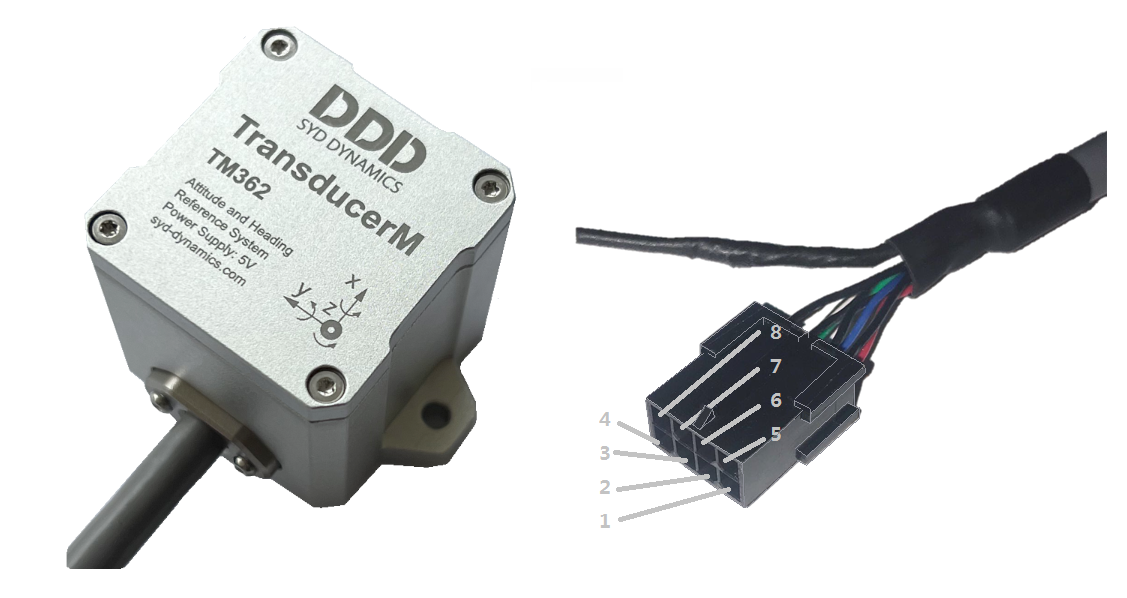
- IP67 (With SF12 connector, otherwise main body only)
RELIABILITY
Shock Resistant and Active Magnetic Field Compensation:
The module is resistant to temporary shock or vibration, and features intelligent self-adapting filter for improved heading accuracy.
Quality-of-Service (QoS)
SYD Dynamics’s motion module provides a measure of its healthiness, and notifies the host computer of potential drop of measurement quality upon extreme conditions, making it possible for integrating with reliability in mind.
DIGITAL INTERFACE
- UART (TTL 3.3V compatible with TTL 5.0V)
- CAN 2.0B Standard and Extended ID (Configurable)
- USB 2.0 (Full speed, USB Virtual COM Port profile)
- Output Rate 200 Hz, 100 Hz, 50 Hz, 25 Hz, 10 Hz, 5 Hz, 1 Hz Typ.
*Specifications are subject to change without notice.