Communication Protocol
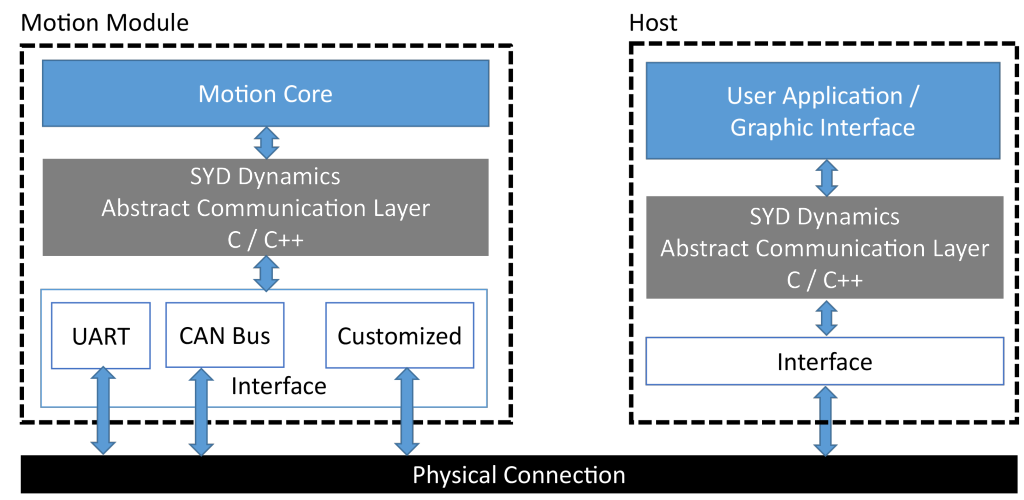
To read the data, or setup the Motion Module, an easy-to-access yet powerful communication interface is introduced, by utilizing the SYD Dynamics Abstract Communication Layer based on C/C++. Whether to communicate with the module via UART, CAN Bus, or any other customized interface, the same protocol applies to ease the development of host application.