TransducerM TM210 Introduction
SYD Dynamics TransducerM Model no. TM210 is Attitude and Heading Reference Systems(AHRS).

The TransducerM TM210 is designed with a focus on cost and reliability. It exhibits excellent dynamic and static performance in roll, pitch, and yaw measurements, along with outstanding yaw stability. Additionally, its gyroscope and accelerometer can be customized for various temperature calibration ranges.
Typical Performance
| PERFORMANCE | TM210 | NOTES | |
|---|---|---|---|
| Resolution | 0.01°/s | ||
| Yaw angle output range | ±1000 °/s | ||
| Dynamic accuracy (inertial) |
2.6° error every 25 minutes | RMS Error1, 2, 3 | |
| Bias Stability | <5.5°/h | Constant temperature, measured by pure noise integration4 |
|
| Bias drift with temperature | ±0.004°/s/°C | -10 ~ 60°C range, measured after QoS5 index reaches 5 |
|
| Non-linearity | 0.10% FS | ||
| Output rate (depending on configurations) |
800,400,200, 100, 50, 25, 10, 5, 1 | Hz | |
|
1. According to test results mostly in laboratory environment. |
|||
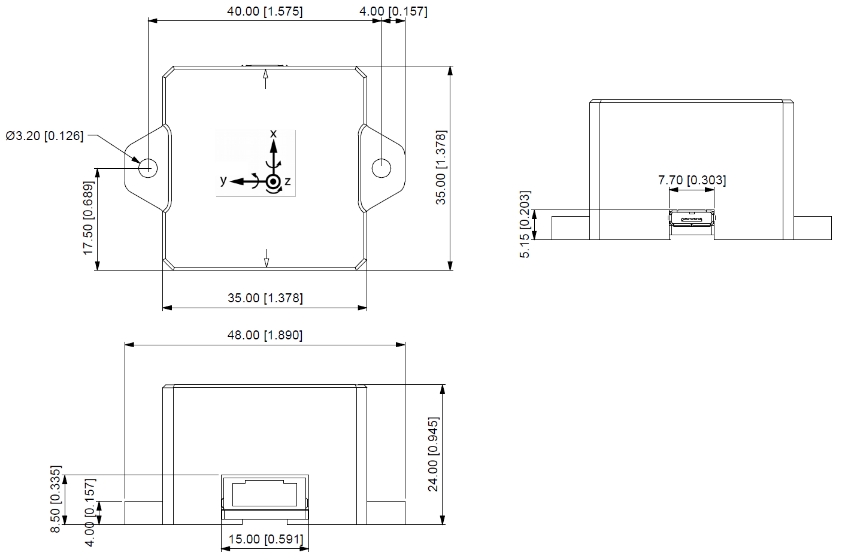
COMPACT PACKAGE WITH
- 35 x 35 x 24 mm (Excluding Mounting Brackets).
- Mechanical drawing. Unit: mm [inch], Mounting holes: M3.
Quality-of-Service(QoS)
SYD Dynamics’s motion module provides a measure of its healthiness, and notifies the host computer of potential drop of measurement quality upon extreme conditions, making it possible for integrating with reliability in mind.
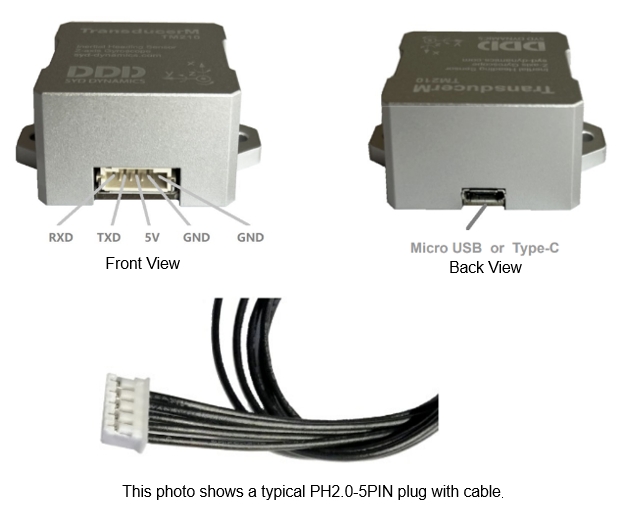
DIGITAL INTERFACE
The TransducerM TM210 communicates through dual ports:
- UART (TTL serial port, TTL 3.3V and 5V compatible)
- Type-C (issued by default for new products) or Micro-USB (USB 2.0 running Virtual COM Port profile)
- Output rate 800Hz, 400Hz, 200Hz,100Hz,50Hz,25Hz,10Hz,5Hz,1Hz configurable
*Specifications are subject to change without notice.